








Malakabot 2023 clausura
Alumnado de 1º Artes Escénicas, IES Politécnico Jesús Marín, curso 2022-2023. Profesoras responsables: Aurora Aranda y Elena Escamilla. Maquillaje: alumnado del IES Profesor Isidoro Sánchez. Coreografía inspirada en el proyecto Nueva Bauhaus.
Diseñador: Carlo Cervantes. Maquillaje: Carmen Perea y Marina Cobos (IES Profesor Isidoro Sánchez). Modelos: Regina Pérez y Salvador Muñoz. Diseños inspirados en el proyecto Nueva Bauhaus.
Idea conceptual: Enrique Norro y Juan Mejías. Coreografía: Juan Mejías. Música: Enrique Norro. Bailarina: Marta Linxing Morales Pérez. Programación del Ur3, de Universal Robots: Eduardo Luis Streater Arranz. Profesorado y alumnado del IES Politécnico Jesús Marín (Bachillerato de Artes Escénicas y Ciclo Formativo de Mantenimiento Electrónico). La performance forma parte de la adaptación de la obra Metrópolis, realizada por Politécnico Teatro 2023.
Malakabot 2023 talleres
Robótica colaborativa UR Maker
Carlos Pérez (Universal Robots)
Proyecto Bauhaus: Arte, Electrónica, Animatrónica y Wearables
IES Politécnico Jesús Marín, IES Profesor Isidoro Sánchez, Barbatos FX, IES Juan de la Cierva, IES Luis de Lucena
Impresión de circuitos con tinta conductora
Roberto Pereila (Voltera Ventaja Tecnológica)
BRAILEA y Maquetas Tiflológicas
Equipo de Atención al Alumnado con Discapacidad Visual de Málaga. Grupo de trabajo Industria 4.0 (Dpto. Edificación y Dpto. Electrónica, IES Politécnico Jesús Marín)
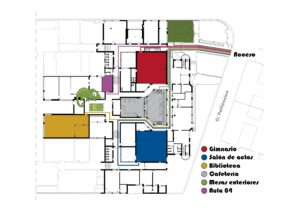
Malakabot 2023

 En los siguientes enlaces puedes consultar las bases de las competiciones a concurso:
En los siguientes enlaces puedes consultar las bases de las competiciones a concurso:

Mama, I´m coming home
Cartel estética Bauhaus, diseñado por el alumno de Artes Plásticas, Antonio Jesús Acosta, bajo la tutela de la profesora de Dibujo, Encina García.
 Idea original y viñeta realizada por Julia Norro.
Idea original y viñeta realizada por Julia Norro.
https://www.youtube.com/watch?v=K0siYUjV9UM
Selección de los carteles a concurso:



El Patrimonio Industrial y la Interdisciplinariedad, una propuesta de motivación al alumnado
Blog de Patrimonio Industrial (agrupación de centros educativos)
Resolución de la Secretaría de Estado de Educación, por la que se convocan ayudas destinadas a promover agrupaciones de centros educativos para la realización y puesta en práctica de proyectos comunes que favorezcan la educación inclusiva y la innovación educativa. Convocatoria 2022.
- IES Politécnico Jesús Marín: 9.000€.
- IES El Palmeral: 9.000€.
- IES Juan de la Cierva: 9.000€.

 Ponencia en el
Ponencia en el
Arte y Electrónica: El Gran Camaleón
El Gran Camaleón, de más de tres metros de envergadura, construido a medias entre el IES Isidoro Sánchez y el IES Politécnico Jesús Marín.
El alumnado de Caracterización se encargó de la cabeza de aspecto realista, con Virginia Palomino y Carmen Pozo como profesoras responsables, la estructura fue moldeada y soldada a partir de varillas de acero de 6mm en los talleres de Carrocería, por Gregorio Vizán, fue decorada mediante material reciclado en las aulas de Dibujo, por estudiantes del Bachillerato de Artes Plásticas, a las órdenes de José Luis Dávila, diseñador de la obra, y la electrónica fue implementada por el alumnado del ciclo formativo de Mantenimiento Electrónico, en el módulo impartido por Enrique Norro. Y todos estuvieron coordinados por la profesora de Historia del Arte, Aurora Aranda, responsable del grupo interdisciplinar de trabajo el Colectivo El intruso, fundado en 2019.
En los ojos del camaleón se pueden divisar dos sensores de movimiento que hacen cambiar de color los leds en función de las personas que haya a su alrededor.
realizada por el alumno de Mantenimiento Electrónico Jorge Trujillo
Cartel del Colectivo El Intruso
Los proyectos de Arte y Robótica del Politécnico Jesús Marín rompen esquemas en Granabot 2022
 David Cuartielles, fundador de Arduino, visitó el IES Politécnico Jesús Marín, y nos pilló trabajando en El Gran Camaleón.
David Cuartielles, fundador de Arduino, visitó el IES Politécnico Jesús Marín, y nos pilló trabajando en El Gran Camaleón.

 Fotografías tomadas durante Granabot 2022
Fotografías tomadas durante Granabot 2022
El Ministerio de Educación y Formación Profesional nos invitó a montar un stand en el I Congreso Internacional de FP (30-31 marzo 2023), en el Palacio Municipal de IFEMA, Madrid, y allí que nos fuimos una representación del Colectivo El Intruso con el Gran Camaleón, minisumos y demás cacharritos.
Ministra de Educación y Formación Profesional : Pilar Alegría. Profesores del IES Politécnico Jesús Marín: Enrique Norro (Electrónica), Gregorio Vizán (Vehículos) y José Luis Dávila (Dibujo). Exalumno de Electrónica: Aitor Fernández (Cervian).
BRAILEA: Juguete para aprender BRAILLE
MálagaHoy: Docentes y alumnos crean en Málaga un dispositivo para aprender braille jugando
DiarioSur: El dispositivo creado en este instituto de Málaga para que aprender braille sea un juego de niños

 Proyecto llevado a cabo en el ciclo formativo de Mantenimiento Electrónico del IES Politécnico Jesús Marín, de Málaga, dentro del grupo de trabajo Creación y difusión de materiales para la atención al alumnado con discapacidad visual (Instagram: Equipo educativo de atención al alumnado con discapacidad visual de Málaga).
Proyecto llevado a cabo en el ciclo formativo de Mantenimiento Electrónico del IES Politécnico Jesús Marín, de Málaga, dentro del grupo de trabajo Creación y difusión de materiales para la atención al alumnado con discapacidad visual (Instagram: Equipo educativo de atención al alumnado con discapacidad visual de Málaga).
Proyecto de Celia Romero (añade palabras)
Proyecto de Igor Dumbrava (añade morse)
Profesor de Electrónica: Enrique Norro. Maestras y maestros del Equipo Específico de Atención al Alumnado con Discapacidad Visual de Málaga (EEAADV): Casti Campanario, Amalia Vioque, Esther Páez, María del Mar Montiel, Francisco Javier Escalona, Ana Belén Fernádez, Gustavo Algarra.
Nuestro agradecimiento al alumnado que se ha prestado a probar los prototipos.
